BEACON


Laser technology and LiDAR sensors for underwater exploration and maintenance applications
This is a pioneering project with the objective of designing and building a proof of concept of an advanced LIDAR system for autonomous underwater (UUV) and remotely operated vehicles (ROV). The complexity of operation in the marine environment, combined with the difficulties inherent in underwater imaging, have so far hindered its development.
BEACON is the technological innovation project developed by Subsea Mechatronics, Beamagine, CD6-UPC and Radiantis, coordinated by secpho.
The initiative has received funding from the Ministry of Industry and Tourism corresponding to Next Generation EU funds, canalised through the support programme for Innovative Business Groups, whose objective is to digitalise industry.


The developed system will enable autonomous vehicles to perform precision inspections improving navigation and the autonomy and safety of UUVs and ROVs.
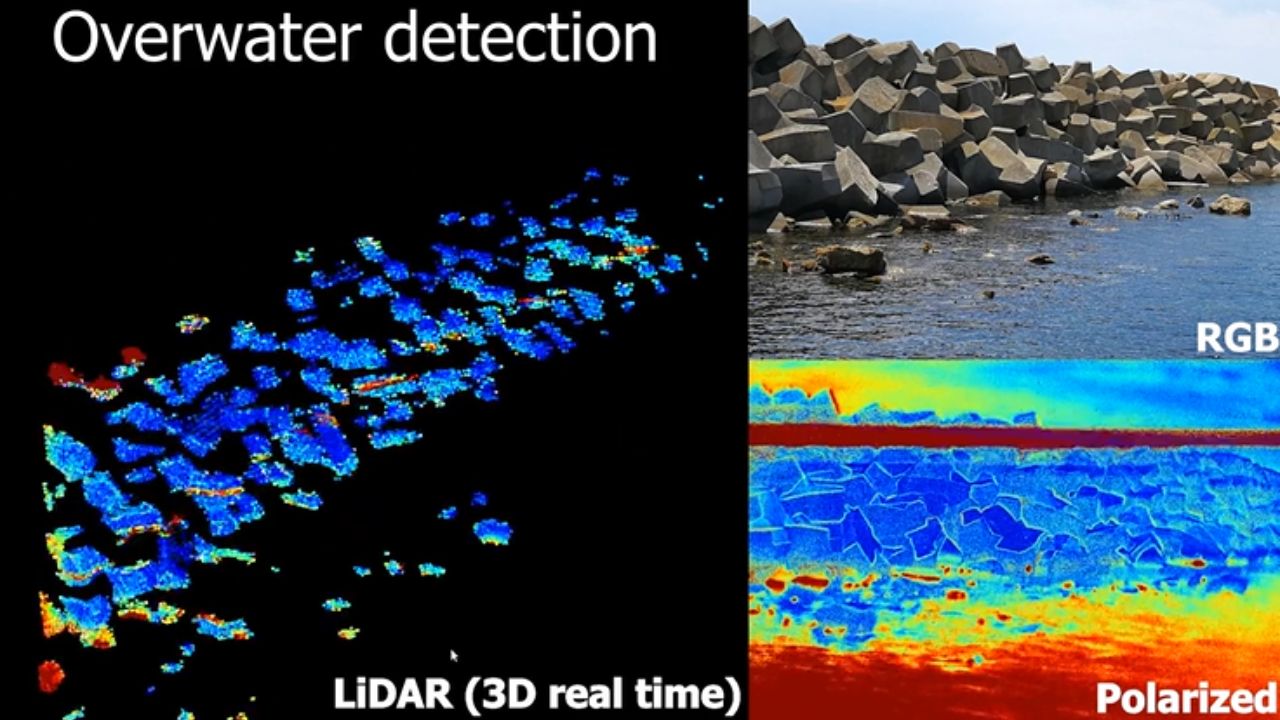
The main objective of the project has been to develop a LIDAR system that uses laser technology and sensors to detect and map the underwater environment. This system will allow autonomous vehicles to perform precision inspections improving navigation and the autonomy and safety of UUVs and ROVs.
The presence of turbidity, attenuation of optical radiation and the use of unusual wavelengths are obstacles that the consortium will address. UPC-CD6 has worked on the development of a new scanning and detection optomechanics adapted to the specificities of the underwater environment, as well as on the determination of sensitive detectors and on the improvement of the visibility of the LIDAR system in adverse conditions. It has also led the integration of the different subsystems. Beamagine, for its part, has adapted the firmware and electronics of its lidar systems in a terrestrial environment for the underwater environment. Radiantis, with its expertise in wavelength conversion technologies, played a key role in the development of the necessary pulsed laser light source. Finally, the final difficulty has resided in the marine environment, since the validation of such a system involves the integration, use and operation of underwater vehicles, the field of expertise of Subsea Mechatronics (SSM).
BEACON represents a significant step towards the advancement of autonomous subsea technology and promises to positively impact various industries that rely on subsea exploration and maintenance.
The proposed underwater LIDAR system opens up new possibilities for a variety of applications, including underwater infrastructure survey, topographic measurements, coastal ecosystem analysis, target search and location, mine clearance and more. Its ability to provide accurate detail and overcome visibility limitations makes this system an invaluable tool for underwater exploration and maintenance.
Each member of the consortium brings key technical competencies to address the complete development of the prototype. From laser light generation to integration into underwater vehicles, the consortium has extensive experience and capabilities that have ensured the success of the project, with proof of concept demonstrating the feasibility and effectiveness of the underwater LIDAR system in challenging environments.