CLICA

Prototipo industrial de cámara LIDAR, elemento clave en el desarrollo del vehículo autónomo
El sistema está compactado en una única cámara autoregistrada para la adquisición de imagen Lidar (Captura simultánea de nubes de puntos) e imagen RGB (Información de color) facilitando la fusión de los datos, paso imprescindible para integrar en vehículos que funcionen de forma autónoma. Es un desarrollo pionero por su fiabilidad, robustez y precisión y está protegido por una patente liderada por Beamagine.
Clica da nombre a este innovador proyecto que ha sido beneficiario del programa de apoyo a las Agrupaciones Empresariales Innovadoras, coordinado por secpho. Beamagine contó con la colaboración del Centro de Desarrollo de Sensores, Instrumentación y Sistemas de la Universidad Politécnica de Cataluña (UPC-CD6), un centro de investigación especializado en ingeniería óptica con capacidades de prototipaje electrónico y mecánico, para aportar el know-how necesario para el diseño optomecánico detallado.

El LIDAR es la nueva tecnología que revoluciona el sector de automoción, concretamente el de los coches autónomos.
Barcos y aviones militares cuentan con radares que les permiten evitar obstáculos inesperados en sus cercanías y, por lo tanto accidentes que pueden arrasar con muchas vidas humanas. Sin embargo, el nuevo contexto protagonizado por el IoT (Internet de las Cosas) exige nuevos sistemas de sonsorización más precisos que contribuyan a crear, por ejemplo, coches autónomos perfectamente capaces de identificar todos los elementos que puedan aparecer a sus alrededores.
Es ahí donde entra en juego el LIDAR (Light Detection and Ranging), la nueva tecnología que revoluciona el sector de automoción, concretamente el de los coches autónomos. Estos dispositivos colocados en el interior o en el exterior de estos son capaces de emitir un haz de luz láser que, cuando regresa de vuelta tras chocar con un obstáculo, permite al sistema identificar los objetos en su proximidad, incluso proporcionando la distancia a la que se encuentran estos.
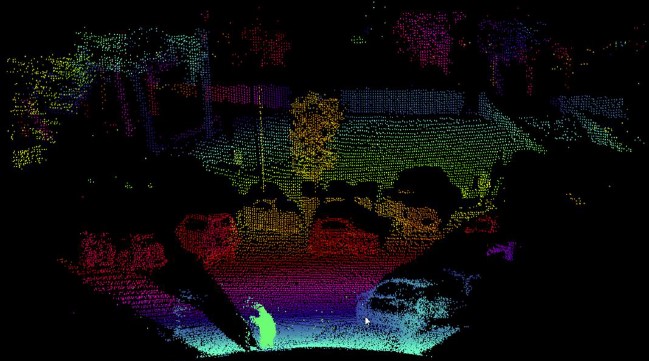
A diferencia de los radares convencionales, el lidar permite convertir esas métricas en una recreación en 3D de todo el entorno, con una visión completa de 360 grados, y por medio de unos algoritmos, se identifica cada uno de los objetos atribuyéndoles una identidad y un riesgo concreto.
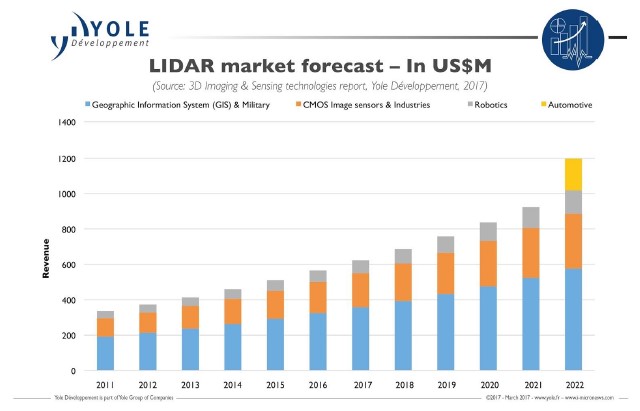
A menudo, los sensores lidar se están introduciendo en combinación con otras familias de sensores, típicamente sensores de imagen (cámaras CMOS de color, o RGB), con el lidar aportando nuevas funcionalidades o bien actuando como respaldo a los sensores más convencionales y bien establecidos en los que confía el mercado.
El proyecto ha desarrollado una cámara que aúna la adquisición de imagen lidar e imagen RGB con la finalidad de facilitar la fusión de los datos en tiempo real

Sin embargo, la combinación de la información de estos sensores no siempre es fácil. Las imágenes 2D y 3D tienen resoluciones espaciales muy diferentes (número de píxeles), y, sobre todo, son captadas a través de sistemas ópticos distintos con aberraciones (distorsión, aumento) diferentes, y que cubren campos de visión distintos. La utilización de dos sistemas de imagen independientes, además, introduce errores de paralaje complejos entre ambos sensores a diferentes distancias, así como la necesidad de gestionar las zonas de sombra sin datos que produce la imagen lidar.
Por lo tanto, Clica ofrece una solución técnica que permite el uso de una única cámara para la adquisición de la imagen lidar y la imagen RGB con el objetivo de simplificar el proceso de fusión de datos, paso imprescindible para integrar en vehículos que funcionen de forma autónoma, ya que los campos y aberraciones ópticas en las dos imágenes son muy similares. Así, se eliminan por completo los errores de paralaje a diferentes distancias debidos a la posición separada de las dos cámaras y también permitiría optimizar el espacio ocupado por los sistemas y así reducir el coste de los mismos.
Es un desarrollo pionero por su fiabilidad, robustez y precisión. Colocados en el interior o en el exterior de los coches, son capaces de emitir un haz de luz láser que, cuando regresa de vuelta tras chocar con un obstáculo, identifica los objetos próximos proporcionando la distancia a la que se encuentran. También permite convertir esas métricas en una recreación en 3D de todo el entorno, con una visión completa de 360 grados, y por medio de unos algoritmos, se identifica cada uno de los objetos atribuyéndoles una identidad y un riesgo.